(C:)
(C:) Design
Design Redbull racing
Redbull racing Racing drone
Racing drone Simple Irrigation System
Simple Irrigation System Rick & Morty Portal Gun
Rick & Morty Portal Gun USO
USO Spidy
Spidy FAJA
FAJA SOCIUS
SOCIUS
SOCIUS
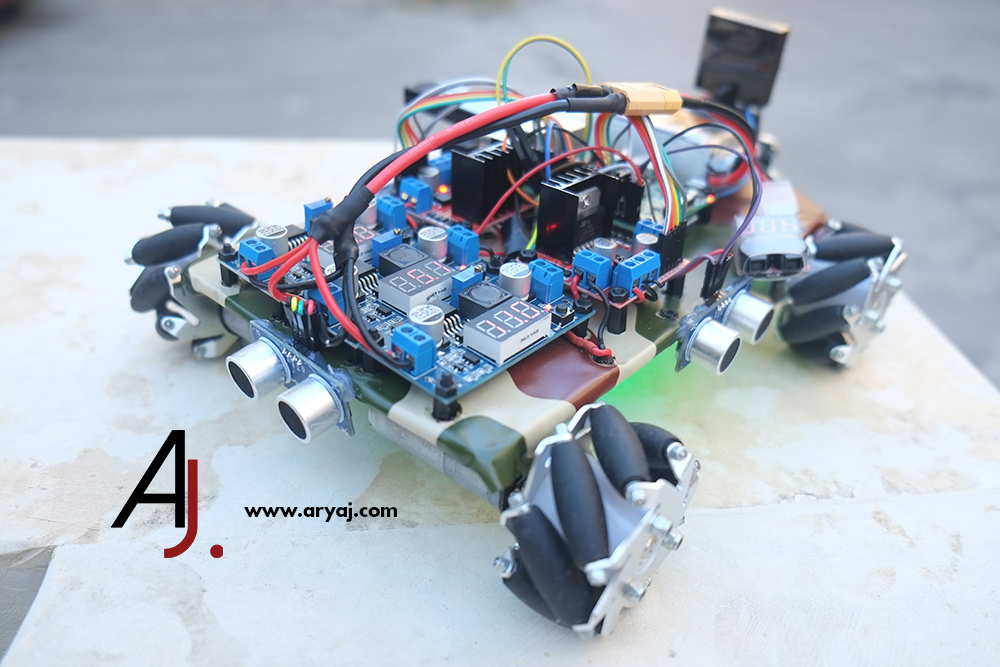
SOCIUS means companion in Latin. This project aims to provide an unmanned ground vehicle (UGV) for two major purposes:
- Critical situations where a rescue team cannot expose or access themselves.
- Made out of carbon fiber, it can carry up to 10kg of weight load in full autonomy.
It can achieve these goals by having these functionalities :
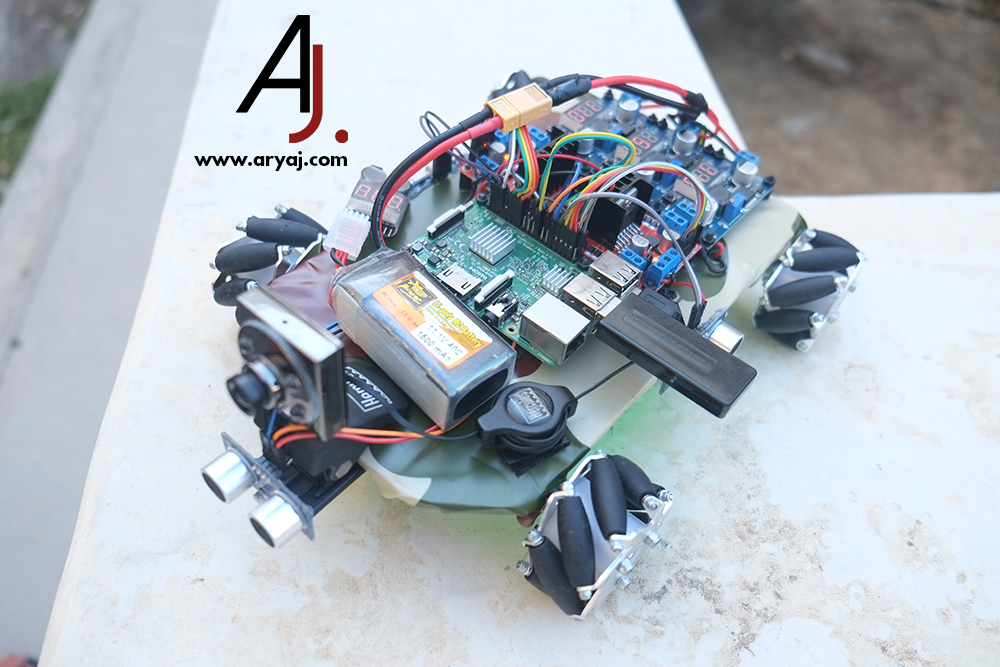
- It’s using image processing to follow the user and therefore not requiring any wireless data or sensors such as GPS. In some places, there might be wireless interferences or the GPS satellites cannot be reachable (e.g. you’re indoor).
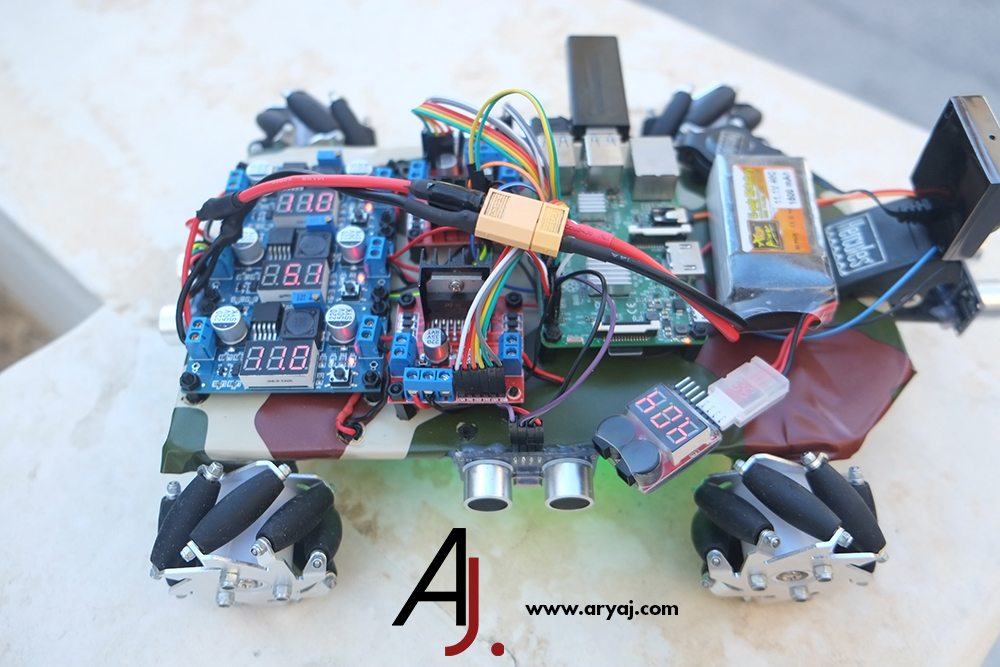
- Thanks to the ultrasonic sensors the robot is able to avoid obstacles.
- It’s having patented mecanum wheels, these are omnidirectional (can move in literally any direction), and each motor is controlled independently. This allows the robot to access to places inaccessible for any other traditionally wheeled robot.
- Switching automatically to manual mode, whenever you decide to, you can switch on the wireless controller (radio wavelength), the automatic follow will turn off and will let you control the robot manually.
- Finally, a video stream is coming to the computer of your choice by installing the software I developed.
This robot is programmed with C++ & Arduino. As this is a prototype and will remain so, I haven’t measured the battery lifetime.